Industriaj robotoj havas ultra-altan flekseblecon kaj precizecon, malaltajn postulojn pri la labormedio, daŭrigeblan funkciadon, stabilan produktokvaliton, kaj altan efikecon. La fabriko enkondukis Yaskawa 6-aksajn manipulajn robotojn GP12 por establi aŭtomatan ŝarĝo- kaj malŝarĝosistemon sur la muntolinio.
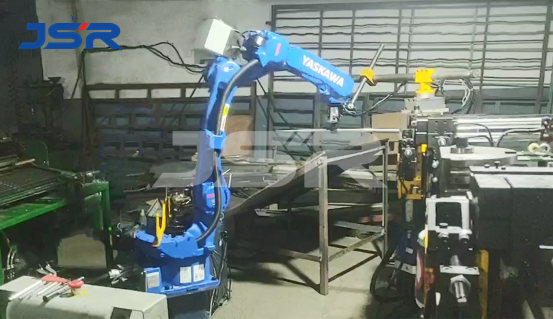
Ĉi tiu estas firmao, kiu komercas pri biciklaj partoj, kaj GP12 laboras pri ŝarĝado kaj malŝarĝado de biciklaj stiriloj. Li bezonas movi la ŝtalan tubon de punkto A al la tubfleksilo. Post la prilaborado, la tubfleksilo elprenas ĝin kaj movas ĝin al punkto B. Ĝi devas esti prenita precize.
Programo-Efektivigo:
1. La inĝeniero faru racian planadon kaj konstruadon laŭ la efektiva labormedio de la klienta loko.
2. Konduku la signalinteragan drataron laŭ la signaloj postulataj de la kampa ekstera ekipaĵo kaj la roboto.
3. Programis la robotan logikan programon kaj instruis la robotan trajektorion.
4. Programtestoj plenumas kontrolpostulojn kaj produktadbezonojn.
5. Kompletigis surlokan instaladon kaj sencimigadon, kaj provizis trejnadon pri ekipaĵfunkciigado por klientoj.
6. Post kelkaj tagoj da laboro, la surloka ekipaĵo havas nulan paneoftecon, kio povas plenumi la 24-horan seninterrompan produktadon de la fabriko.
La manipula roboto reduktas la laborintensecon de laboristoj, plibonigas produktadon kaj laborefikecon, certigas la personan sekurecon de laboristoj, kaj realigas aŭtomatigon, inteligentecon kaj humanigon. Jiesheng pretas provizi personecigitajn industriajn robotajn aŭtomatigajn solvojn por ĉiu kliento.

Afiŝtempo: 9-a de novembro 2022
